
Lennuki F-15E HUD. |

Tüüpiline vaade läbi HUD'i. |
Pardamõõtesüsteemid lennunduses
Taivo Lints
Referaat teemal nr. 102,
aines "Andmehõive- ja mõõtesüsteemid"
(LEM5000),
kevadel 2002.
Sissejuhatus
Lennunduse algusaegadel olid pardamõõtesüsteemid teisejärgulise tähtsusega. Esmane eesmärk oli üleüldse natukenegi õhus püsida. Pealegi olid mõõteriistad sel ajal veel suhteliselt algelised. Õhusõidukite täiustudes tekkis ka vajadus saada täpsemat infot nii sõiduki enda kui ka tema asendi kohta õhuruumis. Pardamõõtesüsteemide osatähtsus järjest kasvas ning tänapäeval on lennumasinad varustatud suure hulga keerukate mõõteriistadega. Vaid "vanadelt olijatelt" võib veel kuulda meenutusi aegadest, kus piloodi ainsad abivahendid olid "needle, ball and airspeed" ehk siis kompass, aviohorisont ja kiirusemõõtja.
Mille poolest lennunduses kasutatav mõõtetehnika erineb tavapärasest? Loomulikult on üheks omapäraks mõõdetavad parameetrid, nagu näiteks õhkkiirus. Aga lisaks sellele tuleb arvestada, et lennundus on kõrge riskiastmega tegevusala ja seab seetõttu ranged nõuded kasutatavale tehnikale, muuhulgas mõõteriistadele. Ebatäpsed andmed võivad põhjustada õhusõiduki hävimise koos inimohvritega. Riknenud mõõteriistade asendamine lennu käigus on enamasti võimatu, eriti kosmosesõidukite puhul. Riski vähendamiseks on paljud süsteemid dubleeritud.
Selles referaadis antakse lühike ülevaade
lennumasinate (eelkõige lennukite) olulisemate mõõteriistade
tööpõhimõtetest ja kasutamisest, samuti andmehõivest
ja kogutud andmete salvestamisest.
Instrumendid
Piloodile infot andvad näiturid jagunevad kolme põhikategooriasse:
1. Õhusõiduki tehnilisest seisukorrast teavitavad instrumendid. Siia kuuluvad näiteks tahhomeeter (mootorite pöörded), kütusevoolu, õlirõhu ja mootorite temperatuuri näidikud.
2. Õhusõiduki käitumisest teavitavad instrumendid. Annavad infot õhkkiiruse, kõrguse, tõusu / laskumise kiiruse jms. kohta.
3. Navigatsiooniinstrumendid, mis kergendavad õige tee leidmist sihtkohta. Need instrumendid kasutavad muuhulgas signaale maapinnal asuvatelt raadiomajakatelt ja kosmoses asuvatelt GPS-satelliitidelt.
Enamus klassikalisi näitureid on osutitega,
aga järjest enam levivad ka digitaalsed instrumendid. Suhteliselt
uus vahend on esiklaasiindikaator (Heads Up Display, HUD), mis võimaldab
projitseerida suvalist infot, sealhulgas kõigi kolme kategooria
instrumentide näite, piloodi ees asuvale läbipaistvale ekraanile.
|
Lennuki F-15E HUD. |
Tüüpiline vaade läbi HUD'i. |
Aviohorisont (attitude indicator).

Aviohorisont näitab lennuki asendit maa horisondi
suhtes. Hele poolring kujutab taevast, tume maad. Keskel asuv punkt kujutab
lennuki nina ja kaks jämedat valget joont lennuki tiibu. Horisontaalse
otselennu ajal asuvad nina ja tiivad joonel, mis kujutab horisonti. Lennuki
külgkallet on võimalik täpsemalt lugeda instrumendi ülaservast.
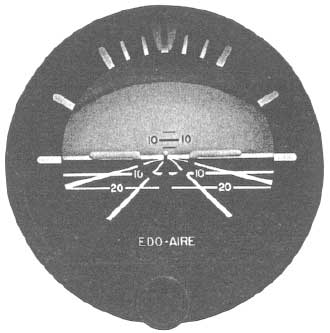
Horisontaalne otselend. |
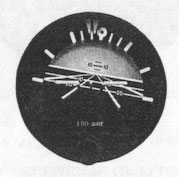
Nina maa suunas, väike kalle vasakule. |
Aviohorisont on eriti oluline siis, kui nähtavus on piiratud -- öistel lendudel või pilvede läbimisel -- aidates vältida inimese meeleelundite poolt põhjustatud vigu. Sellised vead tulenevad tasakaaluelundi (asub sisekõrvas) ja somatosensoorse süsteemi (üle kogu keha asuvad tajurakud) omadustest. Nimelt lennuki kiirendamisel tekkivad jõud on küllaltki suured võrreldes raskusjõuga, seega summaarne kehale mõjuv jõud võib oluliselt kõrvale kalduda raskusjõu suunast. Inimene on aga kohastunud eluga stabiilsel maapinnal, kus selliseid lisajõude ei eksisteeri, ning peab summaarset jõudu raskusjõuks, tajudes seetõttu lennuki orientatsiooni valesti.
Näiteid piloodi tajuvigadest lennuki orientatsiooni hindamisel ilma maa horisonti nägemata:
LENNUK: Sooritab ühtlast pikaajalist pöörangut.
PILOOT: Ei tunneta pööramist.LENNUK: Kiirendus sõidusuunas.
PILOOT: Arvab, et lennuk on saba suunas kaldu (sooritab tõusu).
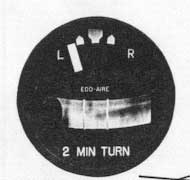
Pöörangu- ja libisemisnäitur.
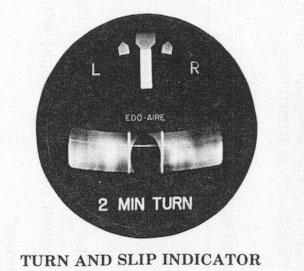
Osuti (üleval) näitab pööramise suunda. Mullike (keskel) näitab lennuki "libisemist". |
Järsk pööre vasakule, libisemine samuti vasakule ehk sissepoole (pöörde suhtes). |

Normaalne pööre paremale, libisemine vasakule ehk väljapoole. |
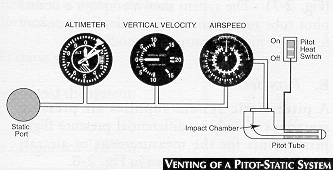
"Pitot' - staatiline" süsteem.
Kui õhusõiduk muudab kõrgust
või kiirendab / aeglustab, siis atmosfääri rõhk
temale muutub. "Pitot' - staatiline" süsteem mõõdab
neid muutusi, andes infot sõiduki õhkkiiruse, kõrguse
ja kõrguse muutuse kiiruse kohta. Süsteemi üks ots --
Pitot' toru -- asub õhuvoolus ja teine ots õhuvooluta kohas.
Pitot' torust saadakse löökrõhk, teisest otsast aga staatiline
rõhk. Nagu jooniselt näha, on mõlema toruga ühendatud
ainult õhkkiiruse mõõtur. Kõrgusmõõtur
ja püstkiiruse mõõtur vajavad ainult staatilist rõhku.
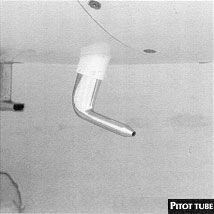
Joonisel toodud süsteemi Pitot' torul on ka soojendaja, mille eesmärk
on toru jäätumise vältimine. Lisaks jääle ohustab
Pitot' toru ka kõikvõimalik praht ja sodi, mis võib
toru ära ummistada. Seetõttu on väga oluline enne lendu
kontrollida toru korrasolekut.
 |
 |
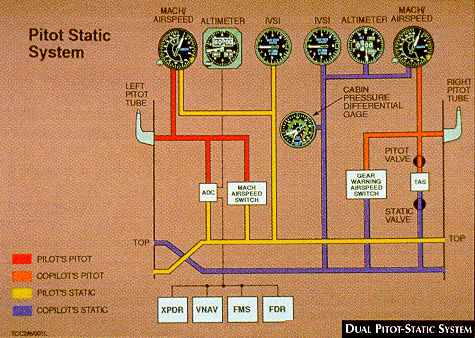
Ummistustest tulenevate probleemide vähendamiseks
kasutatakse näiteks duaalset "Pitot' - staatilist" süsteemi,
milles kõik elemendid on dubleeritud:
"Pitot' - staatilisele" süsteemile iseloomulikud vead:
Õhu tiheduse muutustest tulenevad vead -- mida hõredam õhk, seda väiksem ka tema löökrõhk. Paranduse viib sisse pardaarvuti, arvestades õhurõhku ja temperatuuri.
Asendi (paigaldamise) vead -- Pitot toru ja staatilise rõhu toru avade ebaõige asend õhuvoolu suhtes. Jagunevad omakorda kahte alaliiki: 1. Püsivad vead -- iseloomulikud kõigile antud tüüpi õhusõidukitele (tootja vead). 2. Muutuvad vead -- põhjuseks kere deformatsioonid jms.
Kokkusurutavuse vead -- esinevad suurtel kõrgustel ja suurtel kiirustel, kus õhk Pitot' toru ava juures kokku surutakse.
Hüsterees -- membraanide ja vedrude puudulik
elastsus. Nad kalduvad säilitama oma kuju ka veidi aega pärast
väliste jõudude muutumist.
Õhkkiiruse näitur (airspeed indicator).
Tavalise õhkkiiruse näituri lugemit
nimetatakse mõõteriistakiiruseks. See seade mõõdab
staatilise rõhu (saadakse sensorilt, mis ei asu õhuvoolus)
ja löökrõhu (rõhk, mis saadakse Pitot' torust,
mis asub õhuvoolus) vahet. Kui sõiduk seisab, on rõhud
võrdsed ja õhkkiirus null. Sõiduki liikumine tekitab
Pitot' torus suurema rõhu ja tekkiva rõhkude vahe järgi
arvutatakse õhkkiirus -- kiirus, millega sõiduk liigub
läbi õhu (ühikuks tavaliselt sõlm (knot).
1 sõlm = 1,85 km/h). Kiiruse annab avaldis:
sqrt(2 x [Pitot' torust saadud rõhk -
staatiline rõhk] / õhu tihedus).
Eelpoolkirjeldatud mõõteriist üritab mõõta lennuki kiirust õhu suhtes. Väikestel kõrgustel on saadud tulemus väga lähedal lennuki tegelikule õhkkiirusele. Kõrguse kasvades muutub õhk hõredamaks ja löökrõhk väheneb, mille tagajärjel mõõteriistakiirus väheneb. Tegeliku õhkkiiruse teadasaamiseks tuleb arvesse võtta ka temperatuuri ja õhurõhku. Sellega tegeleb pardaarvuti. Lisaks arvestatakse ka teadaolevaid "Pitot' - staatilise" süsteemi vigu, samuti lennuki kohtumisnurka (angle-of-attack, õhuvoolu nurk lennuki suhtes. Põhjustab torude avade ebaõiget asendit õhuvoolu suhtes). Saadud tulemust nimetatakse kalibreeritud õhkkiiruseks.
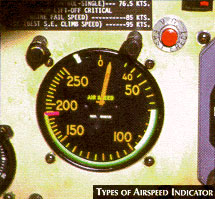
Mõned õhkkiiruse näiturid omavad ka arvuti poolt välja arvutatud tegeliku õhkkiiruse näitu (välimine skaala. TAS = True AirSpeed):

Teekonnakiirus (groundspeed) on õhusõiduki
kiirus maa suhtes. See on võrdne tegeliku õhkkiirusega, millele
on lisatud tuule mõju. Teekonnakiirust on võimalik mõõta
inertsioonilise navigatsioonisüsteemiga või GPS-vastuvõtjate
abil.
Kõrgusmõõtur (altimeter).
Kõrgusmõõtur on põhimõtteliselt baromeeter, mis mõõdab õhurõhku. Atmosfääri rõhk teatavasti kahaneb kõrguse kasvades. Selle instrumendi reaktsiooniaeg on küll suhteliselt väike, aga kiiretel tõusudel või langustel tuleb arvestada, et näitur jääb tegelikust olukorrast veidikene maha.
Kõrgusmõõturi näidikuid on küllaltki erineva kujundusega. Klassikaline näitur on järgmine:
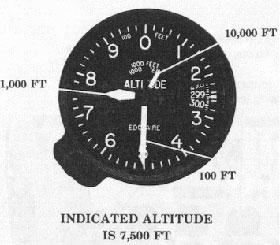
Selliselt kolme osutiga näidikult on natukene
problemaatiline kiiresti kõrgust välja lugeda. Seetõttu
on enamusel lennukitel näit ka numbrilisel kujul, nagu näiteks:

Aga enamasti on olemas ka klassikaline näitur, kuna ta on suhteliselt töökindel ega sõltu elektritoitest.
Kuna kõrgusmõõtur on tegelikult baromeeter, mis on lihtsalt kalibreeritud näitama lennuki kõrgust, siis peab arvestama ka õhurõhu üldisi muutusi. Infot õhurõhu kohta edastavad piloodile lennuinfokeskused. Vastavalt infole peab piloot seejärel kõrgusmõõturit ümber seadistama. Selleks on näituri paremas servas väike skaala, millele tuleb seada tegelik õhurõhk (ühik tavaliselt tolli elavhõbedasammast).
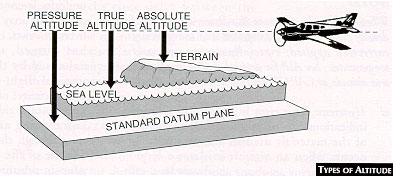
Et vältida vigu lennuki kõrguse määramisel, on kasulik teada erinevaid kõrguse definitsioone:
1. Indicated altitude -- õigesti
seatud õhurõhu väärtusega kõrgusmõõturi
näit.
2. Pressure altitude -- standardõhurõhule
29,92 tolli Hg (760 mmHg) seatud kõrgusmõõturi näit.
3. Density altitude -- pressure altitude,
mida on korrigeeritud vastavalt temperatuurile.
4. True altitude -- täpne kõrgus
keskmisest merepinnast.
5. Absolute altitude -- tegelik kõrgus
maapinnast.
[Tõlge puudub, kuna esines olulisi vasturääkivusi erinevate allikate vahel.]
Nähtused, mis võivad oluliselt mõjutata kõrgusmõõturi näitu:
a) Mägede mõju -- suurte mäetippude läheduses või mäeahelike vahelistes orgudes võib esineda õhuvoolude (tuule) kiiruse järsk kasv, mille tagajärjel tekib lokaalne madalama õhurõhuga ala (vastavalt Bernoulli printsiibile) ja kõrgusemõõturi näit kasvab.
b) Laskuvad õhuvoolud ja turbulentsid -- eriti tõsised laskuvad õhuvoolud esinevad jällegi mägedes. Suurtes mäeahelikes, näiteks Kaljumägedes (USA), võib laskuva õhu kiirus ulatuda 25 meetrini sekundis. Kui see laskuv õhumass on suur ja ühtlane, siis võib lennuki rappumist mitte esineda. Kõrgus- ja tõusumõõturid aga teatud tingimustes võivad laskumist mitte näidata (muuhulgas punktis a) kirjeldatud põhjusel). Nii võib piloot lennuki langemist märgata alles siis, kui toimub kohtumine maaga, mis üldjuhul põhjustab tõsiseid ebameeldivusi nii piloodile kui lennukile :(
Mitmete tegurite koosmõjul (kiired õhuvoolud mägedes, tavalisest erinev temperatuur) võib kõrgusmõõturi näit olla õigest väärtusest kuni 1 kilomeetri (!!!) võrra suurem.
Lennuki tegeliku kauguse maapinnast saab kindlaks teha radari abil, saates allasuunas raadiolaineid ja mõõtes maapinnalt peegeldunud laine tagasijõudmisaega. Tüüpiline radarkõrgusmõõtja näidik on ühe osutiga ja logaritmilise skaalaga:
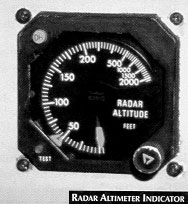
Enamasti on näidikul ka miinimumkõrguse marker (fotol seatud 50 jala juurde), mis annab visuaalse ja / või helilise hoiatuse, kui lennuk laskub madalamale või lendab madalamal seatud väärtusest.
Ka radarkõrgusmõõtur ei ole
täielikult usaldatav. Ebatäpsusi võib põhjustada
lendamine jää, sügava lume ja muude raadiolaineid läbilaskvate
pinnasematerjalide kohal. Saadav kõrgus on ebaõige ka siis,
kui lennuk on oluliselt kaldu, st. radar ei ole suunatud otse alla. Paljudel
näidikutel on hoiatusindikaator, mis annab märku, kui lennuki
kalle on nii suur, et kõrgusnäitu ei saa usaldada.
Variomeeter (Vertical Speed Indicator).
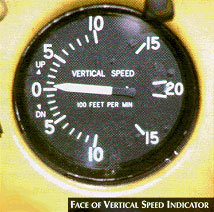
Variomeeter näitab lennuki kiiruse vertikaalkomponenti, mõõtes staatilise rõhu muutumise kiirust. Põhimõte: ühel pool membraani asuv kamber on ühendatud staatilise rõhu toruga läbi väikese ava, teisel pool asuv kamber aga sama toruga läbi suure ava. Lennuki tõustes rõhk staatilise rõhu torus ja ühes kambris langeb kiiremini kui teises, piiratud ühendusega kambris, põhjustades membraani kõverdumise. Laskumisel toimub sarnane asi teises suunas. Jäädes lendama konstantsele kõrgusele, rõhk mõlemas kambris võrdsustub aegamööda (kuni üheksa sekundi jooksul). Sarnane hilistumine on tegelikult olemas kogu aeg, nii et täpse tõusukiiruse saamiseks peab natuke aega konstantse kaldega lendama. Sellegipoolest on variomeeter väärtuslik instrument, kuna teavitab kõrguslikust kõrvalekaldest varem kui kõrgusmõõtur.
Hilistumiseta variomeeter (Instantaneous Vertical Speed Indicator).
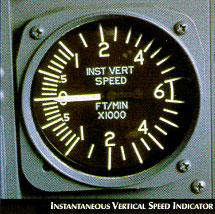
Sellel variomeetril hilistumine praktiliselt puudub.
Tööpõhimõte on sarnane tavalise variomeetriga,
kuid lisatud on kiirendusmõõturid vertikaalse kiirenduse
mõõtmiseks, mis annavad näidikule õige väärtuse
juba siis, kui rõhkude vahet ei ole veel jõudnud tekkida.
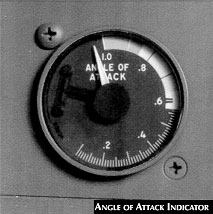
Kohtumisnurga mõõtur (Angle-of-Attack System).
Kohtumisnurk on vastutuleva õhuvoolu
nurk lennuki suhtes. Näiteks maandumise ajal on lennuki nina suunatud
veidikene üles, samal ajal kui lennuk ise liigub allapoole, mistõttu
lennuk ei asu täpselt õhuvoolusuunaliselt.
 |
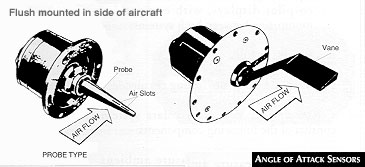 |
Nagu jooniselt näha, on kasutusel kahte tüüpi sensoreid kohtumisnurga mõõtmiseks. Üks neist jälgib rõhumuutusi, mis tulenevad õhuvoolu suuna muutusest, teine aga töötab tuulelipu põhimõttel.
Kui kohtumisnurk muutub liiga suureks, rakendub
tööle varisemissignalisaator (stall-warning indicator),
mis teavitab pilooti tõsisest ohust, andes helisignaali ja / või
raputades juhtkangi ja käivitades automaatse juhtkangiliigutaja. Stall
on olukord, kus lennuki asend ja kiirus õhuvoolu suhtes on sellised,
et tulenevalt aerodünaamikast lennuk ei püsi enam õhus
ja kukub alla.
Lennuparameetrite süsteem (Air Data System).
Enamusel moodsamatel lennukitel on olemas lennuparameetrite süsteem, mis kasutab "Pitot' - staatilisest" süsteemist saadud andmeid, muundades need elektrilisele kujule, tavaliselt digitaalkoodiks. Süsteemi peamised komponendid on:
a) Sensorid. Mõõdavad õhusõidukit
ümbritseva atmosfääri olukorda, sealhulgas temperatuuri.
b) Mõõtemuundurid. Muundavad mõõdetud
rõhu, temperatuuri ja nurga analoogsignaaliks (voltideks) või digitaalkoodiks.
c) Arvuti. Täidab suurt hulka ülesandeid,
näiteks:
* Arvutab tegelikku õhkkiirust, Mach'i arvu, korrigeeritud staatilist rõhku ja korrigeeritud välisõhutemperatuuri.
* Saadab mõõtemuunduritele korrektsioonisignaale.
* Juhib näitureid.
* Varustab infoga navigatsiooniarvuteid.
* Reguleerib õhusõiduki siserõhku (kabiinis).
* Varustab andmetega automaatseid lennujuhtimisseadmeid ja mootorite kütusejuhtimismooduleid.
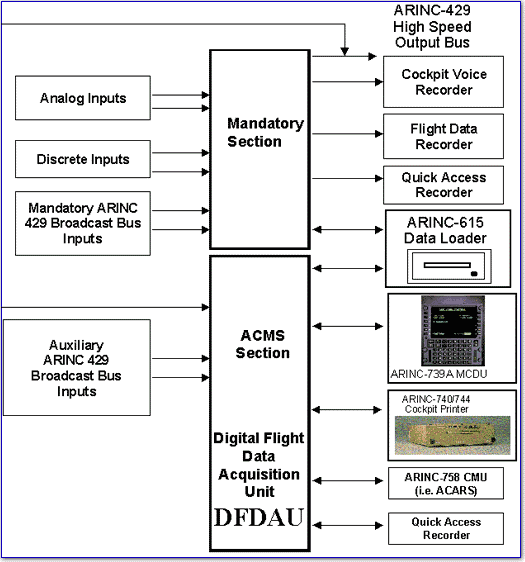
Tsiviillennuki andmehõivemoodul.
Järgnevas on vaadeldud firma Teledyne Controls toodet (DFDAU/DFDMU = Digital Flight Data Acquisition Unit / Digital Flight Data Management Unit) suurte lennukite tarbeks:

See moodul saab andmeid digitaalselt andmesiinilt ja analoogsisenditelt ning vormindab saadud info lennuandmete salvestaja ehk musta kasti jaoks sobivale kujule. Lisaks sellele kohustuslikule funktsioonile on enamusel Teledyne DFDAU-del ka teine protsessor ja mälumoodul, mis võimaldab neil täita mõningaid lennuki seisukorra monitooringu süsteemi funktsioone. Samuti väljastab DFDAU andmeid kabiinis asuvale printerile või ekraanile, andmete maale edastamise moodulile, ja hooldusinfo kogujale, mis salvestab töötlemata andmeid (raw data). Mooduli põhimõtteskeem on järgmine:
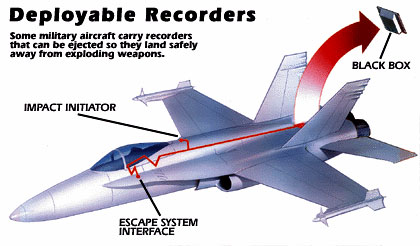
"Must kast" (Black Box).
Lennuandmete salvestajad võeti kasutusele 1950-te aastate lõpus. Neid hakati kutsuma mustadeks kastideks ja see nimi on püsinud tänapäevani, hoolimata faktist, et ülesleidmise kergendamiseks on nad värvitud ereoranzhiks. Vanemad klassikalised mustad kastid kasutavad andmete salvestamiseks magnetlinti, kuid järjest enam levivad mälukaardid, mille eeliseks on liikuvate osade puudumine ja sellest tulenev väiksem kulumine ning suurem vastupidavus lennuki allakukkumisel. Mälumaht valitakse üldjuhul selliselt, et oleks tagatud vähemalt kahe tunni helisignaali ning 25 tunni lennuandmete salvestamise võimalus. Salvestatavate parameetrite arv ulatub suuremates lennukites isegi tuhandeni.
Jäädvustatavad helisignaalid saabuvad kabiinis asuvatest mikrofonidest:
* Piloodi peamikrofon.Salvestamine toimub ringpuhvri põhimõttel -- vana info kirjutatakse lihtsalt üle.
* Teise piloodi peamikrofon.
* Kolmanda meeskonnaliikme peamikrofon (juhul, kui selline meeskonnaliige üldse eksisteerib).
* Mikrofon kabiini keskel (kõikvõimalike muude helide ja mürade salvestamiseks).
Mälukaartidel põhineva musta kasti konstruktsioon:
Ainus osa, mis peab pärast õnnetust terveks jääma, on mälukaartide plokk. See asub eraldi silindris, mis on poltidega kinnitatud ülejäänud osa külge. Mälu ümbritseva silindri kihid seestpoolt väljapoole on:
* Õhuke alumiiniumkest mälude ümber.Kui must kast satub vee alla, rakendub tööle helisignaalide tekitaja (underwater locator beacon), mis saadab kord sekundis välja ultraheliimpulsi sagedusel 37,5 kHz. See "helimajakas" peab suutma töötada vähemalt 30 päeva ja olema töövõimeline kuni 4 km sügavusel.
* Tollipaksune kuumusisolatsioon (1 toll = 2,54 cm).
* Veerandtolline roostevabast terasest silinder. Mõnel juhul ka titaanist.
Juhul, kui must kast on jäänud enam-vähem terveks, saavad uurijad ligipääsu infole praktiliselt koheselt, kasutades kaasaskantavat seadet:

Esialgu asus must kast lennuki ninaosas teiste
seadmete juures, kuid see koht saab õnnetuse ajal tavaliselt enim
kannatada. Seetõttu paigutatakse must kast nüüd enamasti
lennuki sabaossa:
Joonisel toodud sensorid on ainult näited olulisematest mõõtekohtadest. Tegelikkuses ulatub kogutavate parameetrite arv, nagu juba eelpool mainitud, sadadeni või isegi tuhandeni.
Militaarlennukite mustadel kastidel on raskusi allesjäämisega isegi lennuki sabas asudes, kuna õhusõiduk on täis tuubitud kõikvõimalikku plahvatavat kraami a la lõhkepead ja dünamiit. Tuumapommidest rääkimata :) Seetõttu on kasutusele võetud väljaheidetavad mustad kastid, mille idee on järgmine:
Kokkuvõte.
Tänapäevased õhusõidukid on äärmiselt keerukad kõrgtehnoloogilised objektid, mis muuhulgas sisaldavad ka suurel hulgal mõõteseadmeid ja info töötlemise mooduleid. Käesolev referaat andis ainult põgusa ülevaate mõningatest olulisematest teemadest. Kuna lennundus pakub referaadi autorile tõsist huvi, oli plaanis käsitleda teemat märksa põhjalikumalt, aga vähene vaba aeg seadis tööle omad piirid. Näiteks oli kavas tutvustada:
Güroskoopsüsteeme, mis tagavad kursiindikaatori, aviohorisondi ja pöörangunäituri töö. Osa õhusõidukite güroskoope ei tööta mitte elektri, vaid hoopis vaakumpumba mõjul. Uue seadmena on olemas ka lasergüroskoop, millel liikuvad osad üldse puuduvad.
Lennukis kasutatavat magnetkompassi.
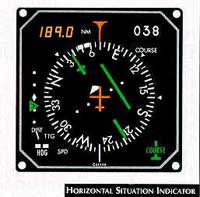
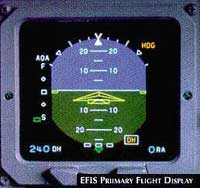
Moodsates õhusõidukites kasutatavaid lennujuhtimissüsteeme, nagu näiteks Horizontal Situation Indicator ja Electronic Flight Instrument System:
 |
 |
 |
Head-Up-Display'd:
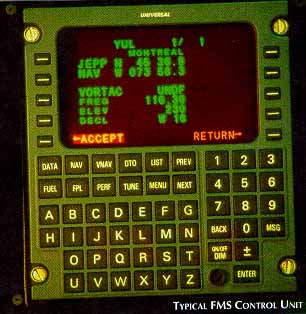
Kõikvõimalikke navigatsiooniseadmeid,
näiteks Flight Management System:
Samuti oli kavas tutvustada kosmoselendude problemaatikat -- seal on riskid ja nõuded veelgi suuremad kui tavalennunduses.
Miks ma seda kõike siin räägin?
Selleks, et äratada uudishimu kõigis neis, kelle jaoks antud
teema vähegi huvi pakub. Edasiliikumise alustamiseks pakun linke,
millest osadelt pärineb ka käesoleva töö algmaterjal.
| http://www.allstar.fiu.edu/aero/ | Väga hea materjal kõigile, kes unistavad piloodiks saamisest. Erilist tähelepanu pöörata jaotisele Principles. |
| http://www.howstuffworks.com/black-box.htm | Musta kasti töö populaarteaduslik käsitlus. |
| http://www.sciam.com/2000/0900issue/0900working.html | Sama teema (must kast). |
| http://www.bath.ac.uk/~en8clf/contents.htm | Kellegi referaat mustadest kastidest. |
| http://www.jpl.nasa.gov/basics/bsf11-1.html | Kosmoselendudega seonduv. Edasiliikumiseks kasutada linki Next Page, mitte üldist teemade loetelu, muidu jääb osa lehti vahele. |
| http://www.teledyne-controls.com/ | Lihtsalt üks firma, mille tooted on suunatud tsiviillennunduse turule. |
Ääremärkus: terminite tõlkimisel on muuhulgas kasutatud raamatut: "Inglise-Eesti tehnikasõnaraamat.", Euroülikool 2000.